Jochen Breidt
Automatisierte Mobilität
Nehmen Sie Kontakt mit uns auf. Ihr persönlicher Ansprechpartner ist:

Jochen Breidt
Automatisierte Mobilität
* Pflichtfelder
Fahrzeuge mit automatisierten Parkfunktionen müssen in einer unbekannten Umgebung exakt lokalisiert werden, um die Sicherheit zu gewährleisten. Auf Basis von verschiedenen Sensordaten der Kamera, Radar und Odometrie entwickelten wir dazu präzise Lokalisierungsalgorithmen.

Die Fahrzeuglokalisierung ist eine Grundvoraussetzung für automatisierte und autonome Fahrfunktionen – nur wenn das Fahrzeug genau weiß, in welcher Umgebung es sich befindet, findet es automatisiert und sicher seinen Weg.
Die Herausforderung bestand in der sehr präzisen Fahrzeuglokalisierung in einer unbekannten Umgebung für eine automatische Parkfunktion – basierend auf verschiedenen Sensordaten von Kamera, Radar und Odometrie. Beim erneuten Abfahren der Strecke muss das System denselben Weg wiedererkennen, die verändernde Umgebung mit der gespeicherten Umgebungskarte abgleichen und die Strecke automatisiert zurücklegen können.

GPS-Daten sind nicht immer präzise – beispielsweise in Tiefgaragen kann das Signal nicht zuverlässig empfangen werden. Um die Performance der Lokalisierung bewerten zu können, braucht es jedoch eine verlässliche Ground Truth. Basierend auf den Anwendungsfällen der automatisierten Fahrfunktion muss daher ein zuverlässiges Mittel für die genaue Lokalisierung festgelegt werden.
Der Fokus der Lösung liegt auf der Entwicklung von komplexen Algorithmen zum Abgleich der gespeicherten Umgebungskarte mit aktuellen Daten. Besonders Wetterverhältnisse, andere Verkehrsteilnehmende oder Objekte können zu Veränderungen der Umgebung führen und damit die Bewegungsplanung des Fahrzeugs beeinflussen.
Mithilfe von Fusions-Algorithmen können die Schwächen des einen Sensorsystems mit den Stärken eines anderen kompensiert werden. Um fehlerbehaftete Sensormessungen als solche zu erkennen und von der weiteren Verarbeitung auszuschließen, wurden Plausibilitäts-Algorithmen eingesetzt. Im Entwicklungsprozess sorgte ein hochperformantes Debugging- und Entwicklungs-Framework dafür, dass Lokalisierungskomponenten gezielt und isoliert entwickelt und debuggt werden konnten. Zur Erfassung realer Ground Truth Daten wurde zudem ein geeignetes Referenzsystem festgelegt und dafür ein Laser-Tracker ausgewählt.
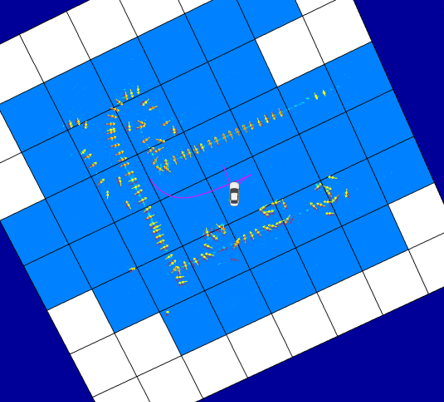
In einer Simulation können Umgebungsdaten abgeglichen werden. Wenn die gelben und roten Pfeile übereinanderliegen, ist der Abgleich von aktuellen und gespeicherten Umgebungsdaten exakt.
Das Ergebnis ist ein radar-basiertes Lokalisierungs-Framework, das mit weiteren Sensordaten aus Kamera, GPS und Odometrie ergänzt werden kann. Zur Beherrschung der Komplexität wurden verschiedene Lokalisierungsansätze kombiniert und mit Simulationen getestet. Den Entwicklungsprozess beschleunigte das Team durch eine effiziente Resimulation der Ziel-Software auf Basis von Python-Scripting. So konnten Simulationsergebnisse schnell ausgespielt und direkt optimiert werden. Eine agile Softwareentwicklung auf Basis von CI/CD ermöglichte zudem die nötige Flexibilität im Projekt.



